PARTES FUNDAMENTALES DE UN MOTOR DE GASOLINA
Desde el punto de vista estructural, el cuerpo de un motor de explosión o de gasolina se compone de tres secciones principales:
1)Culata
2)Bloque
3)Cárter
LA CULATA
La culata constituye una pieza de hierro fundido (o de aluminio en algunos motores), que va colocada encima del bloque del motor. Su función es sellar la parte superior de los cilindros para evitar pérdidas de compresión y salida inapropiada de los gases de escape.
En la culata se encuentran situadas las válvulas de admisión y de escape, así como las bujías. Posee, además, dos conductos internos: uno conectado al múltiple de admisión (para permitir que la mezcla aire-combustible penetre en la cámara de combustión del cilindro) y otro conectado al múltiple de escape (para permitir que los gases producidos por la combustión sean expulsados al medio ambiente). Posee, además, otros conductos que permiten la circulación de agua para su refresco..
La culata está firmemente unida al bloque del motor por medio de tornillos. Para garantizar un sellaje hermético con el bloque, se coloca entre ambas piezas metálicas una “junta de culata”, constituida por una lámina de material de amianto o cualquier otro material flexible que sea capaz de soportar, sin deteriorarse, las altas temperaturas que se alcanzan durante el funcionamiento del motor.
EL BLOQUE
En el bloque están ubicados los cilindros con sus respectivas camisas, que son barrenos o cavidades practicadas en el mismo, por cuyo interior se desplazan los pistones. Estos últimos se consideran el corazón del motor.
La cantidad de cilindros que puede contener un motor es variable, así como la forma de su disposición en el bloque. Existen motores de uno o de varios cilindros, aunque la mayoría de los coches o automóviles utilizan motores con bloques de cuatro, cinco, seis, ocho y doce cilindros, incluyendo algunos coches pequeños que emplean sólo tres.
El bloque del motor debe poseer rigidez, poco peso y poca dimensión, de acuerdo con la potencia que desarrolle.
Las disposiciones más frecuentes que podemos encontrar de los cilindros en los bloques de los motores de gasolina son las siguientes:
1)En línea
2)En “V”
3)Planos con los cilindros opuestos

Diferente disposición de los cilindros en el bloque de los motores de gasolina: 1.- En línea. 2.- En "V". 3.- Plano de cilindros opuestos.

Los bloques en línea pueden contener 3, 4, 5 ó 6 cilindros. Los motores con bloques en “V” tienen los cilindros dispuestos en doble hilera en forma de “V”. Los más comunes que se pueden encontrar son: “V-6”, “V-8”, “V-10” y “V-12”. Los bloques planos son poco utilizados en los motores de gasolina, aunque se pueden encontrar de 4, 6 y hasta de 12 cilindros en unas pocas marcas de coches.
A la izquierda se puede ver el bloque de un motor de cuatro cilindros en línea, visto por la parte de arriba.

Existen además otras disposiciones de los pistones en un bloque, como por ejemplo los radiales o de estrella (ilustración de la derecha), estructura esta que se empleó durante muchos años en la fabricación de motores de gasolina para aviones.
El cárter es el lugar donde se deposita el aceite lubricante que permite lubricar el cigüeñal, los pistones, el árbol de levas y otros mecanismos móviles del motor.
Durante el tiempo de funcionamiento del motor una bomba de aceite extrae el lubricante del cárter y lo envía a los mecanismos que requieren lubricación.
Existen también algunos tipos de motores que en lugar de una bomba de aceite emplean el propio cigüeñal, sumergido parcialmente dentro del aceite del cárter, para lubricar “por salpicadura” el mismo cigüeñal, los pistones y el árbol de levas.

















 En la segunda figura se puede apreciar la transmisión trasera para un carro, el eje vertical mueve el "engrane" que impulsa las ruedas hacia adelante o atrás. En este mecanismo los ejes están perpendiculares entre sí.
En la segunda figura se puede apreciar la transmisión trasera para un carro, el eje vertical mueve el "engrane" que impulsa las ruedas hacia adelante o atrás. En este mecanismo los ejes están perpendiculares entre sí.  Se puede deducir que la posición entre los ejes es de gran importancia al diseñar la transmisión. Las situaciones son principalmente tres: ejes paralelos, ejes que se cortan y ejes que se cruzan. Un ejemplo de esta última situación se aprecia en la figura, en donde una manivela mueve un elemento que llamaremos tornillo sin fin el que a su vez mueve la rueda unida a él. En este caso, el mecanismo se utiliza como tecle para subir un balde. Los ejes se encuentran en una posición ortogonal, o sea, se cruzan a 90 grados.
Se puede deducir que la posición entre los ejes es de gran importancia al diseñar la transmisión. Las situaciones son principalmente tres: ejes paralelos, ejes que se cortan y ejes que se cruzan. Un ejemplo de esta última situación se aprecia en la figura, en donde una manivela mueve un elemento que llamaremos tornillo sin fin el que a su vez mueve la rueda unida a él. En este caso, el mecanismo se utiliza como tecle para subir un balde. Los ejes se encuentran en una posición ortogonal, o sea, se cruzan a 90 grados.  Los engranes propiamente tales son ruedas provistas de dientes que posibilitan que dos de ellas se conecten entre sí. Leonardo nos entrega el siguiente esquema en donde se indican los tres diámetros que definen el tamaño del diente.
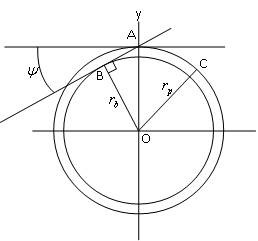
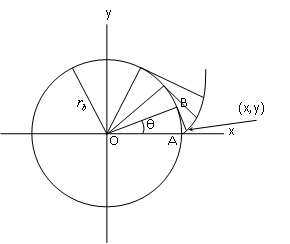
Los engranes propiamente tales son ruedas provistas de dientes que posibilitan que dos de ellas se conecten entre sí. Leonardo nos entrega el siguiente esquema en donde se indican los tres diámetros que definen el tamaño del diente.